AN754 Ver la hoja de datos (PDF) - Microchip Technology
Número de pieza
componentes Descripción
Fabricante
AN754 Datasheet PDF : 13 Pages
| |||
AN754
EXAMPLE 3:
Maximum Bit Rate
The previous example showed that for a given bus
length, the maximum data rate is inversely affected,
due to oscillator tolerance (as oscillator tolerance goes
up, the data rate goes down). To achieve the maximum
bit rate for a given bus length, the emphasis is placed
on configuring the bit time for the propagation delays
(i.e., adjusting PropSeg to maximum). The oscillator
tolerance must be minimized.
Given the same delays as the previous example:
tBUS = 50 m @ 5.5 ns/m = 275 ns
tCMP = 40 ns
tDRV = 60 ns
tPROP = 2(tBUS+tCMP+tDRV) = 750 ns
Since the oscillator tolerance is minimum, the phase
segments and SJW can be set to the minimum. Assum-
ing the bit time is 10TQ total, the PropSeg can be set to
6TQ which sets TQ = 125 ns. Figure 8 shows the bit
timing for maximum bit rate.
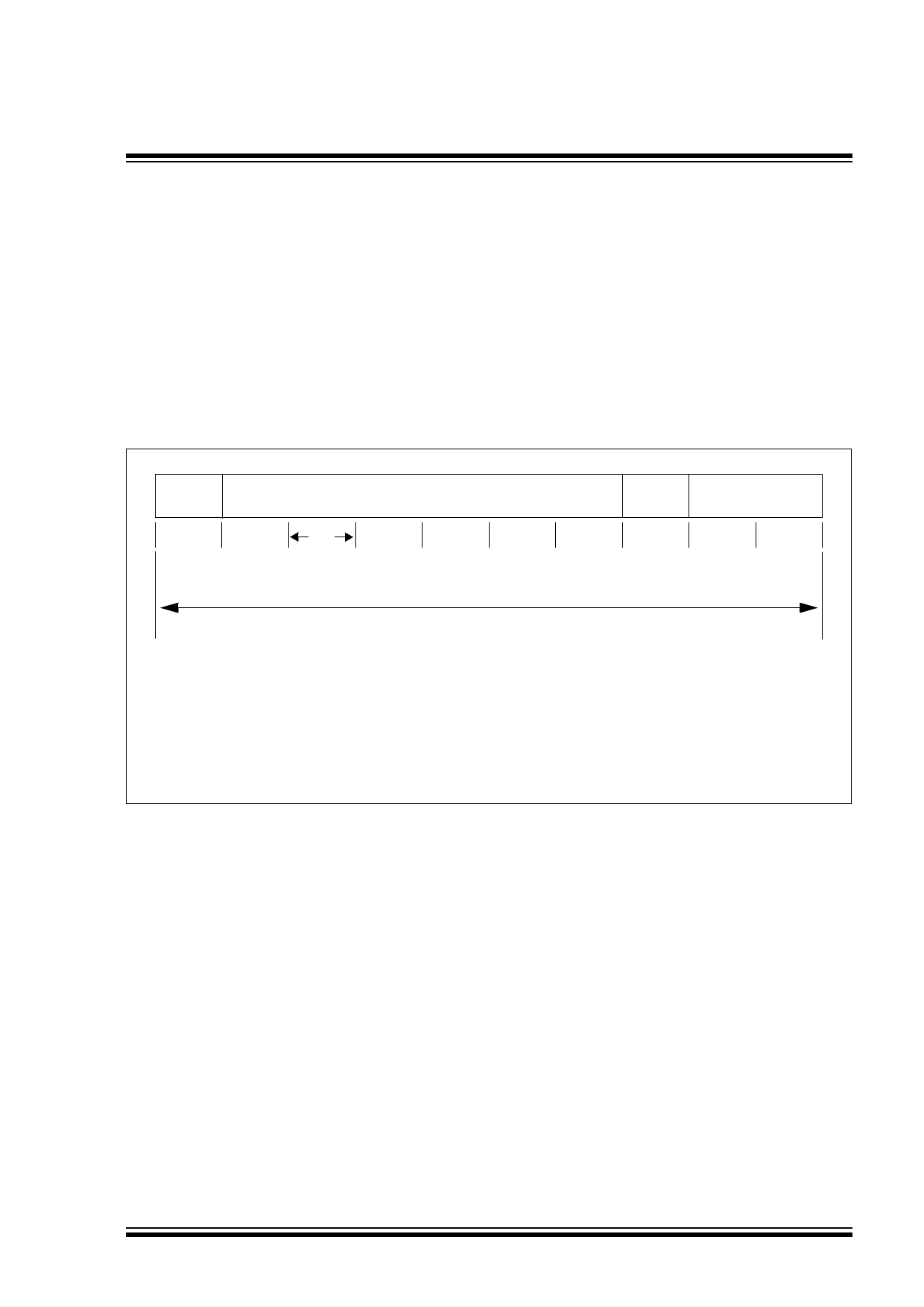
FIGURE 8: BIT TIMING FOR MAXIMUM BIT RATE
SyncSeg
PropSeg
TQ
PS1
PS2
Nominal Bit Time (NBT), tbit
TQ = tPROP / 6 = 125 ns
tbit = 10TQ = 1.25 µs → 800 kb/s
SyncSeg = 1TQ
PropSeg = tPROP = 6TQ
PS1 = 1TQ
PS2 = 2TQ
SJWMAX = 1TQ
REFERENCES
MCP2510 Data Sheet, DS21291, Microchip Technol-
ogy, Inc.
Lawrenz, Wolfhard, “CAN System Engineering From
Theory to Practical Applications”, Springer, 1997
“CAN Specification”, Version 2.0, Parts A and B, Robert
Bosch GmbH, 1991
“ISO11898”, International Standards Organization,
1993
Controller Area Network (CAN) Basics, DS00713
PIC18C Reference Manual, DS39500
PIC18C58 Datasheet, DS30475
CONCLUSION
Setting up CAN bit timing is not an arbitrary process.
The system designer must be aware of the compo-
nents that affect bit timing and compensate to get opti-
mal performance across the network. For example, if
the desired system uses oscillators with the maximum
tolerance, the maximum bus length is reduced. Like-
wise, if maximum bus length is desired, the oscillator
tolerances must be minimized. CAN data rates must
also be considered because the data rate is a third vari-
able that determines maximum length and maximum
oscillator tolerances.
This application note should help assist system engi-
neers design a controller area network for optimal per-
formance based on requirements of the system.
2001 Microchip Technology Inc.
DS00754A-page 9
Share Link: 